
无人机智能巡检系统
一.背景与现状
随着各地区电网规模的不断扩大,变电站数量逐年增加,变电站运维人员的巡检作业工作时间也随之增长。目前,变电站巡检通常以人工巡检为主,高清视频和机器人巡检为辅来开展站内联合巡检。目前面临的问题有:
1.高空设备存在盲区:避雷针、绝缘子串等设备距地面高传统人工巡检与固定摄像头仰视视
2.角存在视觉盲区:细微裂纹、局部发热等缺陷难以及时发现。
3.机器人环境适应性差:机器人对地形和道路的要求也比较严格,造成很多场景无法覆盖。
4.感知能力扩展性弱:机器人难以灵活加装多种特种传感器,感知能力不足导致缺陷识别率不高。
5.施工难度大,成本高:传统方案需要同步轨道等设施,施工周期长,成本高。
二.无人机优势
1.覆盖范围与灵活性:
高空覆盖,无人机可轻松抵达高空设备,弥补高清摄像机和机器人无法触及的盲区;多维度多视角,无人机可在“高中低”空域巡检,覆盖设备巡检的多个视角;同时可额外覆盖变电站外围的输电和配电线路。
2.低部署与低成本:
无人机无需改造变电站基础设施(如铺设路面、布线拉线),机巢部署周期短;无人机与机巢维护相对简单,高清摄像机需要维护大量摄像机和线路,机器人还需维护路面。
3.高巡检效率:
相较于人工巡检和机器人巡检,无人机在巡检效率上有比较大的提升,如果使用多机协同作业,巡检时间会进一步压缩;
4.多种传感器融合:
无人机可搭载高分辨率光学相机、红外热成像仪、激光雷达等设备,同时采集高清图像、温度数据及三维点云信息;无人机的传感能力可基于负载进行扩展。
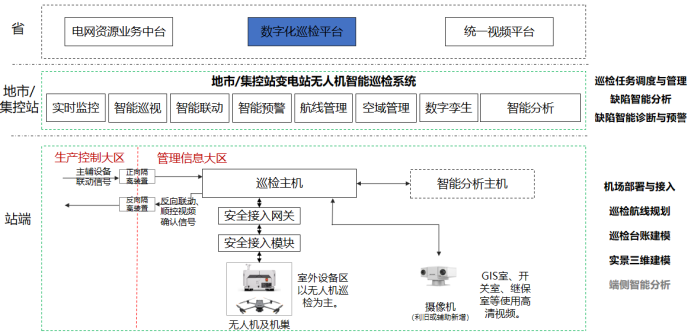
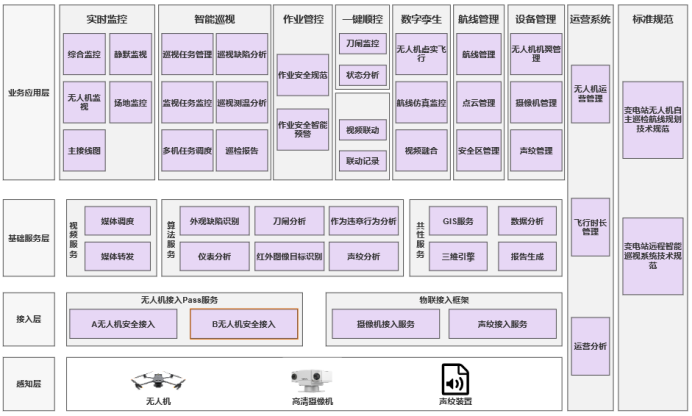
三、产品架构
四、关键技术
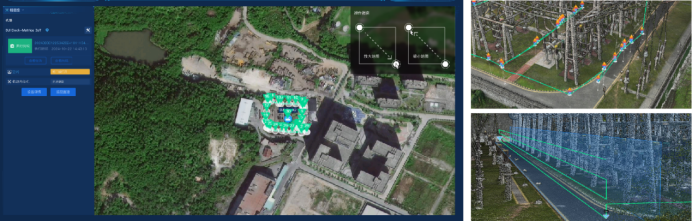
1.无人机导线级避障与绕障
通过AI视觉技术与激光雷达感知探测技术的结合,实现架空导线、镂空树木等障碍物检测,检测到障碍物后,基于自主避障与绕障技术动态调整飞行策略绕开障碍,进一步保障无人机飞行作业安全。
绕障技术是在自主避障技术的基础上,进一步实现无人机在复杂环境中的自主导航和路径规划。
2.智能分析技术
基于无人机和高清摄像机巡视采集的图片,进行智能识别,主动发现缺陷,识别类型包括各类表计、外观缺陷、刀闸分合、压板状态、作业安全异常行为等。
3.实景三维建模技术
通过无人机采集+3DGS重建技术,三维高精度还原变电站场景。3DGS 基于点的渲染技术,通过3D 高斯函数表示场景,结合了基于神经网络的优化和显式结构化数据存储的优点,保留了连续体积辐射场的理想特性。模型带有有地理信息坐标,可量测、可定位、可裁剪编辑,无需人工修模,模型细节真实呈现,提供高质、高效、低成本的模型资产。
4.数字孪生技术
实现基于三维全景的巡检路线规划、三维导航及巡检结果立体呈现;实现主辅监测、三维、视频、巡检数据的深度融合与数字孪生展示,构建数字孪生系统。
五、系统功能
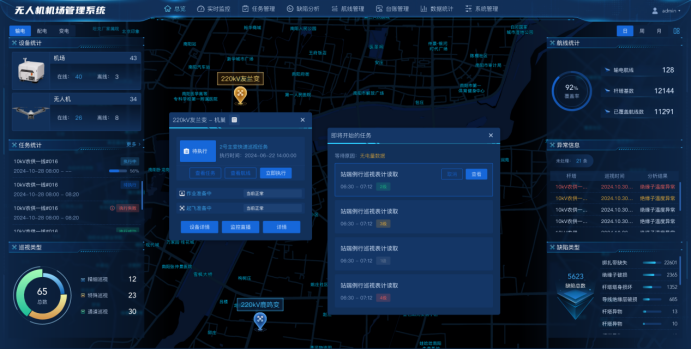
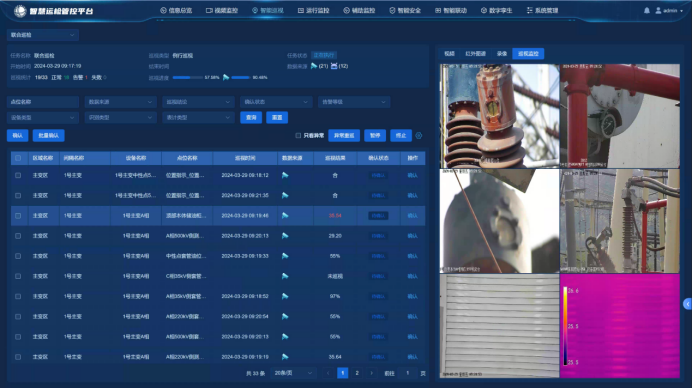
1.运行监控
(1)信息总览:汇总展示站内关键数据信息,如无人机状态、无人机巡视情况、高清视频设备运行情况、告警情况等。
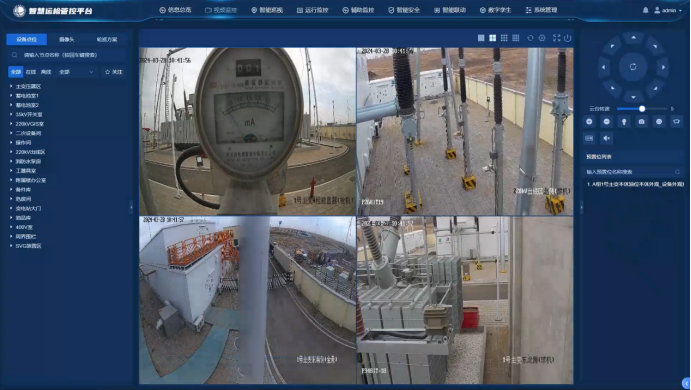
(2)实时高清视频监控:查看实时安防视频监控。
(3)实时无人机监控:实时监控机巢视频、飞行器视频、机巢工作状态、无人机工作状态。
(4)静默监视:摄像机在空闲时间对设备异常、人员异常行为、环境异常进行告警。
2.设备监控
实现变电站数据模型“区域-间隔-设备-部件”与航线航点的关联,基于此实现如下功能:
(1)设备点位:以设备点位目录树,可快速查看设备部件的最新无人机巡视抓拍图片,如果是高清视频监控可查看实时视频。
(2)设备航线:以无人机航线组成无人机覆盖的设备点位目录树“航线(间隔)-设备-部件”,可快速查看最新巡视抓拍结果,也可快速临时起飞无人机进行巡视。
3.航线规划
无人机变电站巡检主要是以航线指引无人机飞行巡检,航线的安全设计与规划,能更好的确保无人机的作业安全。
4.航线管理
变电站点位模型和航线的导入管理,航线点位与变电站设备台账关联,变电站航线基于点位模型的呈现。
5.智能巡视
无人机为主+高清视频为辅巡检,结合规划航线的无人机,以及高清摄像机、无人机,实现多源联合巡检,有效控制项目投资:
(1)以无人机覆盖大部分设备的重点部位和仪表,以及红外测温,可基于无人机的航线进行巡检任务的下发,按照任务调度进行任务执行;
(2)高清视频用于巡检无人机无法覆盖的,如GIS的设备巡检,以及部分仪表。
6.任务调度
无人机任务调度,根据巡检计划,自动生成无人机调度任务,根据每个任务的执飞时间和无人机的充电时间,自动编排无人机任务的衔接时间;
7.作业安全管控
(1)作业人员身份识别:门禁识别到人脸后,自动比对进站人员身份,比对成功自动开启门禁,系统记录开门事件。
(2)作业人员行为分析:通过远程操控无人机,快速起飞至作业管控上空实时对作业现场进行安全监控,并实现对检修作业期间现场施工人员在未戴安全帽、未穿工装、吸烟、越限/闯入等不安全行为进行实时分析,提升现场安全管理水平。
8.无人机航线仿真验证
(1)航线仿真验证:基于变电站精细化三维模型,实现变电站巡检航线的仿真验证,验证航线安全性,以保证实际航线飞行时的安全可靠。
(2)无人机巡检模拟演练:基于变电站三维模型,实现某次巡检任务的模拟演练。
